



三维高精度操作训练模拟器
(一)概述
声学设备是水下航行器的核心传感器,是保障水下航行器自主导航、自主避障、勘探环境和搜索目标的关键设备。水下航行器中常用的声学设备包括声学多普勒计程仪,以及各种类型的高分辨率成像声纳(如前视声纳、下视声纳和侧视声纳等)。其中,每一种用途的声纳又有多种技术实现途径。(二)主要功能
1. 对海底、海面、目标以及航行器本体全四维建模(三维形状+材质)。2. 对航行器本体的运动进行三维六自由度建模。
3. 实时响应用户输入,实时生成和显示高逼真度的声学系统原始回波数据和成像数据。所生成的数据不仅在显示效果上与实际声学设备高度相似,而且在统计特性上也与实际声学设备的测量结果高度相似。
4. 可满足声学多普勒计程仪,前视、下视、侧视等主流声学设备的模拟要求。可根据用户要求,对指定型号的设备进行模拟。
5. 具有半实物仿真功能,通过对接阵在空气中直接对声学系统进行测试。
6. 标准数据输入、输出接口。可根据用户要求生成 XTF 等标准声学数据格式,用户可直接导入 CARIS、HYPACK 等国际通用的声学数据后处理软件。
(三)产品类型和性能指标
1. 支持场景的地图范围不小于 10km×10km,分辨率在厘米级;2.计算机实时生成三维视景,分辨率不低于 1024×768,画面更新率不小于 20 次/秒;
3. 可模拟场景和目标类型 10 种以上;
4.可模拟声纳类型,包括前视、下视、侧视三种安装方式,多波束、合成孔径、单波束、三维等四种技术形态;
5. 模拟声纳频率范围:20kHz~2MHz;
6.模拟声纳带宽范围:100kHz 以内;
7. 模拟航行器航速:1 节~20 节。
8. 模拟计算的缓存和传输综合延迟小于 1 秒;
9. 计算中心存储容量大于 10T,数据中心存储容量大于 200T;
10. 模拟中心的通道数最大可达 1024,带宽 100kHz,带内平坦度<1dB,幅度一致性<1dB,相位一致性<2 度。
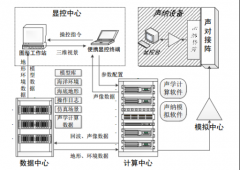
(四)总体结构
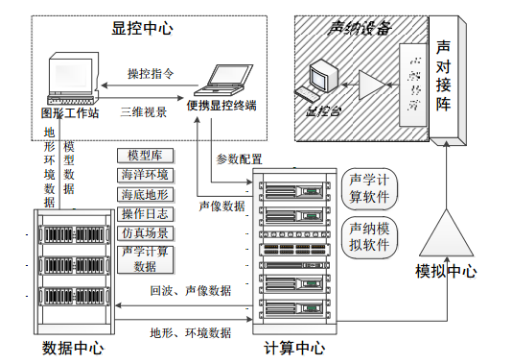
系统组成

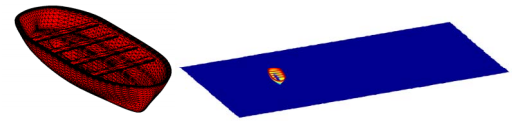
三维视景效果示意
(五)产品照片及水下场景模拟照片

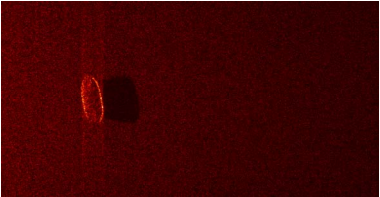
水下小球目标声学成像模拟照片一
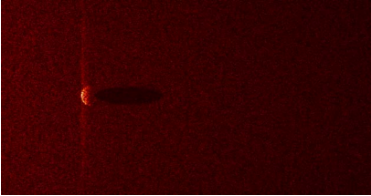
水下小球目标声学成像模拟照片二
水下沉船目标声学成像模拟照片一
水下沉船目标声学成像模拟照片二
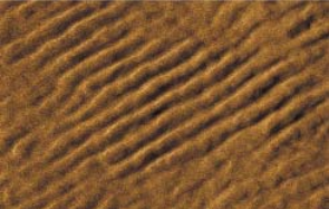
海底地形声学成像模拟照片
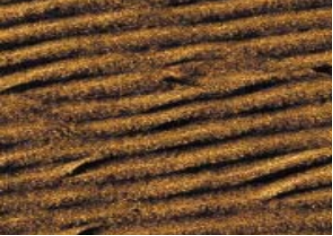
海底地形声学成像真实照片(与模拟照片进行对照)
上一篇:没有了!
下一篇:没有了!